

سلام
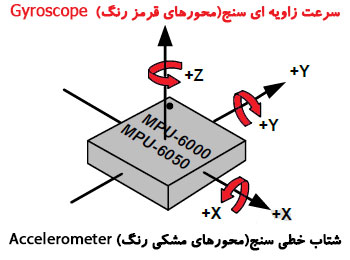
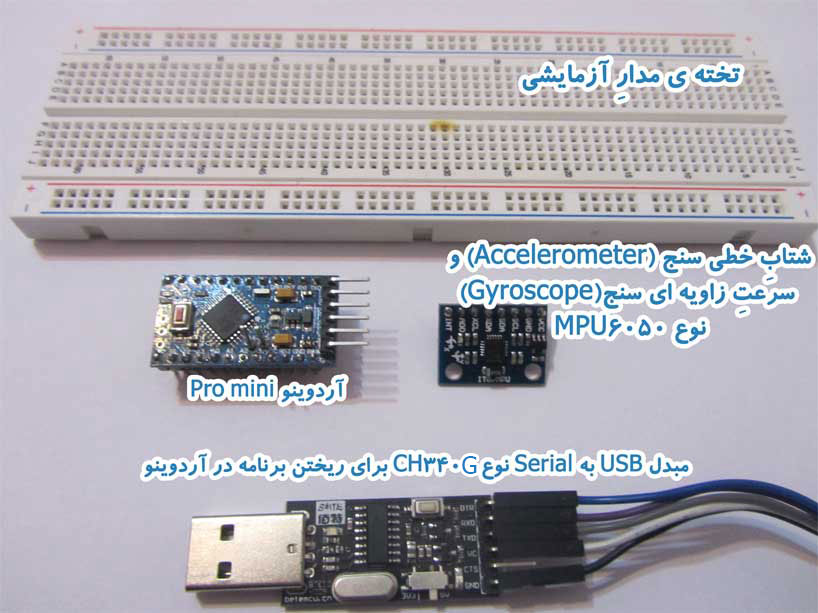
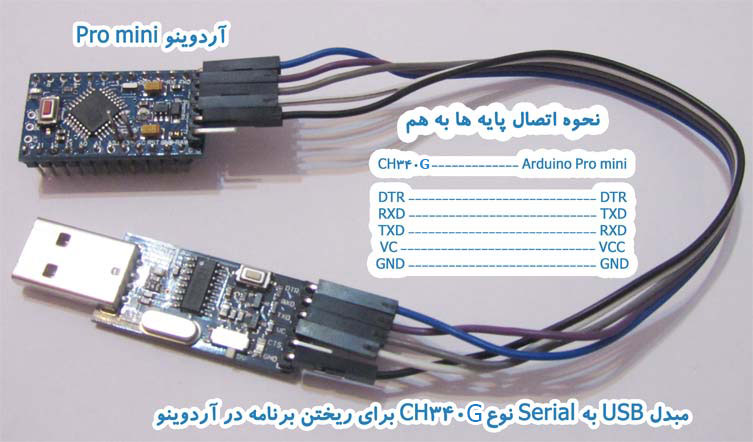
تو این تایپ قراره یک فلایت کنترل بسازیم با استفاده از یک اردینو پرو مینی و یک سنسور imu6050
نکته : اساس کار این فلایت کنترل سرعت زاویه است و قابلیت auto leveling نداره
برای ساخت واجرای پروژه باید چند تا کار انجام داد
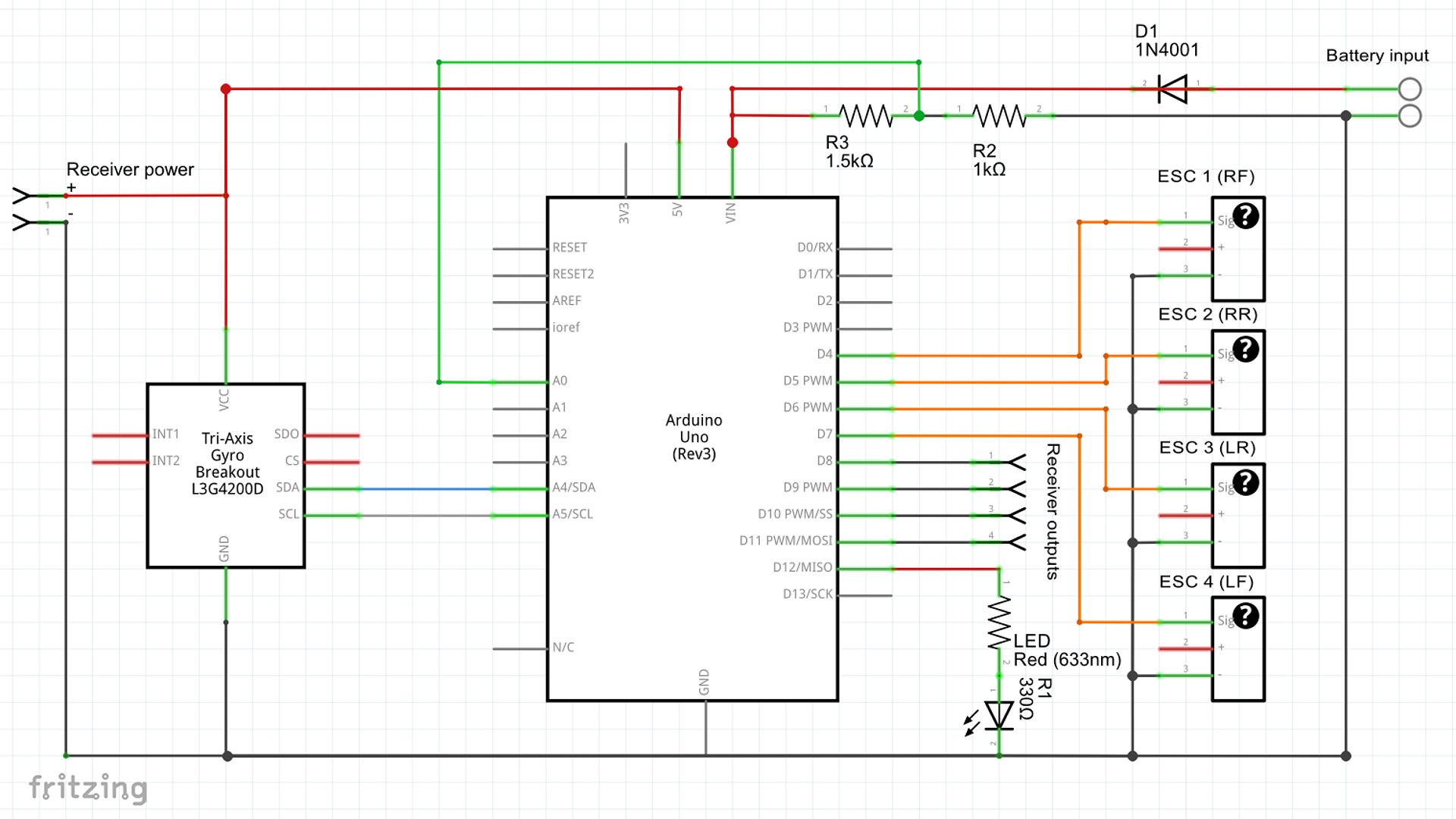
سیگنال ورودی از رادیو کنترل رو بخونیم
سرعت زاویه ای از هر محور رو بخونیم
بتونیم سیگنال رو به اسپید کنترل اعمال کنیم و سرعت موتور ها رو تغییر بدیم
نکته: این فلایت کنترل رو برای یک کوادروتور از X میسازیم (البته بعدا میتونید برای هر نوع مولتی روتور ارتقاش بدید
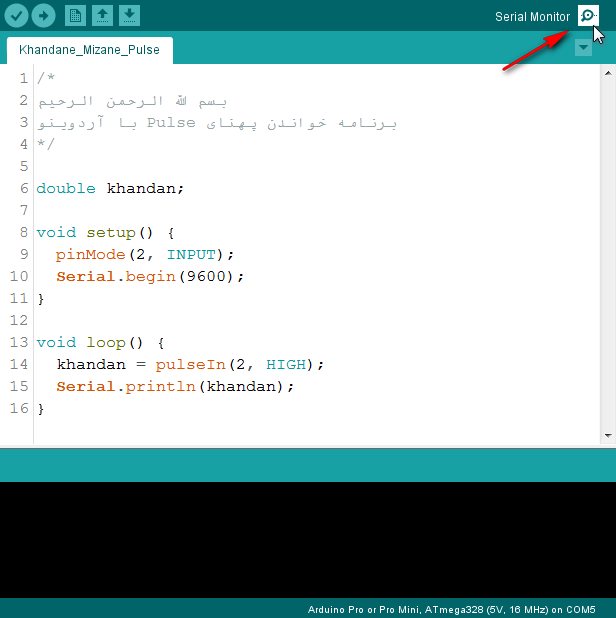
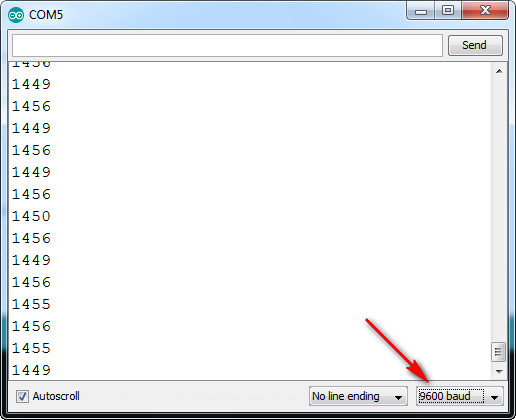
برای شروع میرم سراغ خوندن سیگنال pwm از رادیو

دلیل: ادغام دو پست برای جلوگیری از اسپم
در ضمن این نکته رو بگم : دوستان پیش نیاز این اموزش اینه که اولا بدونید کواد چیه ؟
اجزای تشکیل دهنده و کار هر کدوم از اجرا؟
نحوه حرکت کواد و ...
خلاصه اطلاعات کافی درباره کواد داشته باشید که سوال های متفرقه پیش نیاد
ایشالا اگه دوستان استقبال کنن ادامه میدیم
تو این تایپ قراره یک فلایت کنترل بسازیم با استفاده از یک اردینو پرو مینی و یک سنسور imu6050
نکته : اساس کار این فلایت کنترل سرعت زاویه است و قابلیت auto leveling نداره
برای ساخت واجرای پروژه باید چند تا کار انجام داد
سیگنال ورودی از رادیو کنترل رو بخونیم
سرعت زاویه ای از هر محور رو بخونیم
بتونیم سیگنال رو به اسپید کنترل اعمال کنیم و سرعت موتور ها رو تغییر بدیم
نکته: این فلایت کنترل رو برای یک کوادروتور از X میسازیم (البته بعدا میتونید برای هر نوع مولتی روتور ارتقاش بدید
برای شروع میرم سراغ خوندن سیگنال pwm از رادیو
دلیل: ادغام دو پست برای جلوگیری از اسپم
در ضمن این نکته رو بگم : دوستان پیش نیاز این اموزش اینه که اولا بدونید کواد چیه ؟
اجزای تشکیل دهنده و کار هر کدوم از اجرا؟
نحوه حرکت کواد و ...
خلاصه اطلاعات کافی درباره کواد داشته باشید که سوال های متفرقه پیش نیاد
ایشالا اگه دوستان استقبال کنن ادامه میدیم






 eca در
eca در 











دیدگاه