

با سلام خدمت دوستان گرامی
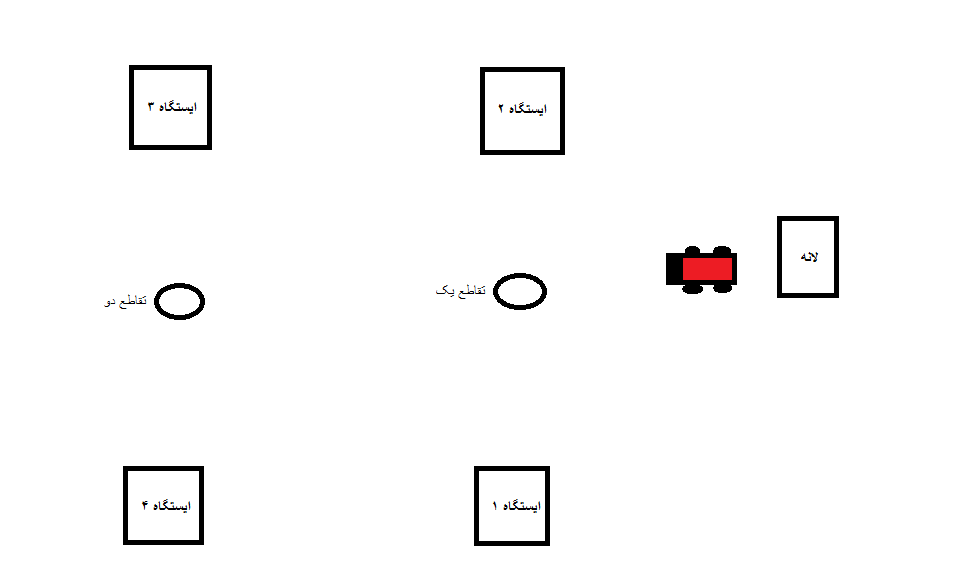
من میخواستم برنامه برای ربات بنویسم به این شکل که اول حرکت رو به جلو داشته باشه و بعد با دیدن سنسور به سمت چپ حرکت کنه مثلا با زاویه 90درجه
بعد از گردش به حرکت رو به جلوی خودش ادامه بده تا جایی که دوباره چشم فعال بشه و بعد در همونجا متوقف بشه
اگه واضحتر بخوام بگم یعنی با فعال شدن سنسور در بار اول گردش داشته باشه و با فعال شدن سنسور در بار دوم متوقف بشه
کسی از دوستان میتونه من رو راهنمایی کنه؟
با سپاس فراوان
من میخواستم برنامه برای ربات بنویسم به این شکل که اول حرکت رو به جلو داشته باشه و بعد با دیدن سنسور به سمت چپ حرکت کنه مثلا با زاویه 90درجه
بعد از گردش به حرکت رو به جلوی خودش ادامه بده تا جایی که دوباره چشم فعال بشه و بعد در همونجا متوقف بشه
اگه واضحتر بخوام بگم یعنی با فعال شدن سنسور در بار اول گردش داشته باشه و با فعال شدن سنسور در بار دوم متوقف بشه
کسی از دوستان میتونه من رو راهنمایی کنه؟
با سپاس فراوان




دیدگاه