
با سلام و احترام
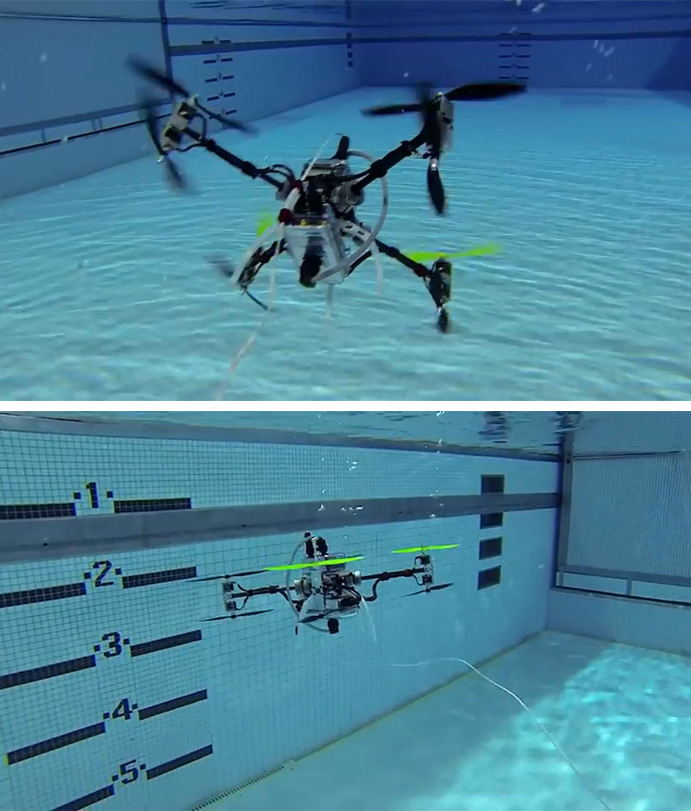
دوستان من روی ساخت یک ربات دوزیست میخوام کار کنم که هم پرواز کنه هم شنا کنه. حدفم هم یادگیری هست بیشتر.
ایده ای که دارم این هست که این ربات بتونه از سیم مستقیم انرژیش رو تامین کنه. به خاطر اینکه هم مداومتش بالاتر بره هم نمیخوام باتری بخرم. اما ترانسش اگه باشه تو بازار بهتره نبود هم یکی از دوستام میگم برام بپیچه
قسمت دیگه اینکه میخوام کنترل ربات به وسیله یک تاچپد باشه. حالا نمیدونم استفاده از شیلد تاچ آردویینو و خود آردویینو و اسپید کنترلر و بعد هم یک براشلس انتخاب خوبیه؟؟
چون آردویینو بلدم اما تا حالا فلایت کنترل ننوشتم اما این پست http://www.eca.ir/forums/thread63307.html رو که خوندم به نظرم جالب اومد برای یادگیری هم خیلی عالیه . شما کدوم رو پیشنهاد میکنین برای سخت افزار لینوکس، ویندوز یا اندروید؟ میخوام بی مشکل باشه
تویه موتور هم میخوام از یک موتور استفاده کنم برای پرواز و شنا کردن. بعد طبق محاسباتم 1 تا 2 کیلوگرم بار روش میوفته میخواستم بدونم چجوری میشه محاسبه کرد تغییر rpm رو نسبت به باری که روش میوفته
و اینکه آیا میشه یه موتور با دور 15000 به بالا رو پیدا کرد؟
الان این موتور رو ببینین http://robosigma.com/t-motor-f20-1406-3200kv-4pcs 3200KV هست
این یکی دورش پایینه اما قدرتش خوبه http://robosigma.com/emax-gt-5345-07...ter-black-12cm
این یکی سرعتش از اولی بهتره قدرتش از دومی کمتر http://robosigma.com/t-motor-f60
موتوری هست که یه چیزه بینابین باشه؟ یعنی اون 1-2 کیلو که روش افتاد دورش کم نشه خیلی؟
این شکلی هست که براش در نظر گرفتم: خوبه به نظرتون؟
ممنون از محبت دوستان
دوستان من روی ساخت یک ربات دوزیست میخوام کار کنم که هم پرواز کنه هم شنا کنه. حدفم هم یادگیری هست بیشتر.
ایده ای که دارم این هست که این ربات بتونه از سیم مستقیم انرژیش رو تامین کنه. به خاطر اینکه هم مداومتش بالاتر بره هم نمیخوام باتری بخرم. اما ترانسش اگه باشه تو بازار بهتره نبود هم یکی از دوستام میگم برام بپیچه
قسمت دیگه اینکه میخوام کنترل ربات به وسیله یک تاچپد باشه. حالا نمیدونم استفاده از شیلد تاچ آردویینو و خود آردویینو و اسپید کنترلر و بعد هم یک براشلس انتخاب خوبیه؟؟
چون آردویینو بلدم اما تا حالا فلایت کنترل ننوشتم اما این پست http://www.eca.ir/forums/thread63307.html رو که خوندم به نظرم جالب اومد برای یادگیری هم خیلی عالیه . شما کدوم رو پیشنهاد میکنین برای سخت افزار لینوکس، ویندوز یا اندروید؟ میخوام بی مشکل باشه
تویه موتور هم میخوام از یک موتور استفاده کنم برای پرواز و شنا کردن. بعد طبق محاسباتم 1 تا 2 کیلوگرم بار روش میوفته میخواستم بدونم چجوری میشه محاسبه کرد تغییر rpm رو نسبت به باری که روش میوفته
و اینکه آیا میشه یه موتور با دور 15000 به بالا رو پیدا کرد؟
الان این موتور رو ببینین http://robosigma.com/t-motor-f20-1406-3200kv-4pcs 3200KV هست
این یکی دورش پایینه اما قدرتش خوبه http://robosigma.com/emax-gt-5345-07...ter-black-12cm
این یکی سرعتش از اولی بهتره قدرتش از دومی کمتر http://robosigma.com/t-motor-f60
موتوری هست که یه چیزه بینابین باشه؟ یعنی اون 1-2 کیلو که روش افتاد دورش کم نشه خیلی؟
این شکلی هست که براش در نظر گرفتم: خوبه به نظرتون؟
ممنون از محبت دوستان






دیدگاه