

با سلام،
دوستان در خصوص کنترلر PID و اعمال اون به مدار دیمر زیر همفکری میخواستم:
مداری که توی ذهنم هست از 2 بخش تشکیل شده:
بخش اول که همون مدار بالا هست به همراه مدار تشخیص عبور از صفر زیر:
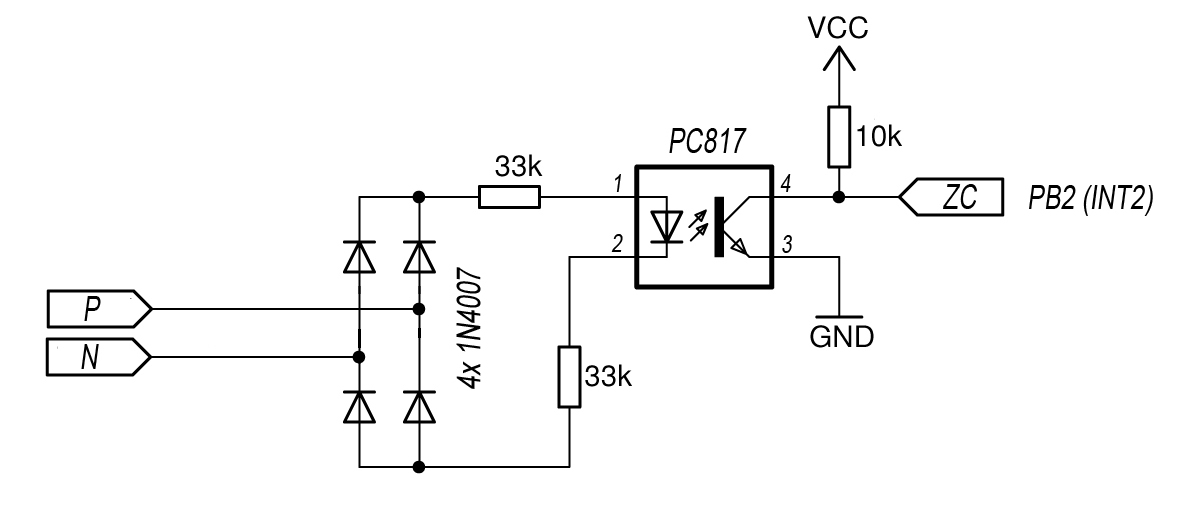
بعبارتی پس از تشخیص هر بار صفر، بیایم و با یک تاخیر 0 تا 10 میلی ثانیه ای ترایاک رو فایر کنیم که با این کار 0 الی 100 درصد توان رو میتونیم روی بار بندازیم. در مورد بخش اول اگه مفهوم رو بد گرفتم لطفا اصلاح کنید چون میخوام مدار رو ببندم.
و اما بخش دوم که راهنمایی میخوام در خصوص چگونگی اعمال سیگنال کنترلر PID به مدار ترایاک بالا هست.
ایده خودم این هست که بیایم و خروجی PID رو scale کنیم روی بازه 0 الی 10 ، و این عدد بشه تاخیر ما، بعبارتی یک "متغیر" برای تاخیر تعریف کنیم و هر بار که zero crossing رخ میده (که این عمل بخاطر فرکانس 50 هرتز شهر، 100 بار در ثانیه اتفاق میفته)، تاخیر رو از توی همون "متغیر" بخونیم و به ترایاک اعمال کنیم.
لطفا چنانچه ایده بهتر و یا اصلاحیه ای دارید دریغ نکنید، سپاسگزارم
دوستان در خصوص کنترلر PID و اعمال اون به مدار دیمر زیر همفکری میخواستم:
مداری که توی ذهنم هست از 2 بخش تشکیل شده:
بخش اول که همون مدار بالا هست به همراه مدار تشخیص عبور از صفر زیر:
بعبارتی پس از تشخیص هر بار صفر، بیایم و با یک تاخیر 0 تا 10 میلی ثانیه ای ترایاک رو فایر کنیم که با این کار 0 الی 100 درصد توان رو میتونیم روی بار بندازیم. در مورد بخش اول اگه مفهوم رو بد گرفتم لطفا اصلاح کنید چون میخوام مدار رو ببندم.
و اما بخش دوم که راهنمایی میخوام در خصوص چگونگی اعمال سیگنال کنترلر PID به مدار ترایاک بالا هست.
ایده خودم این هست که بیایم و خروجی PID رو scale کنیم روی بازه 0 الی 10 ، و این عدد بشه تاخیر ما، بعبارتی یک "متغیر" برای تاخیر تعریف کنیم و هر بار که zero crossing رخ میده (که این عمل بخاطر فرکانس 50 هرتز شهر، 100 بار در ثانیه اتفاق میفته)، تاخیر رو از توی همون "متغیر" بخونیم و به ترایاک اعمال کنیم.
لطفا چنانچه ایده بهتر و یا اصلاحیه ای دارید دریغ نکنید، سپاسگزارم




دیدگاه