

پاسخ : برنامه ربات و مشکل در تشخیص مانع
سلام داداش :rolleyes:
نگا کن دوست عزیز چون در اطراف ما امواج مادون قرمز زیادی از قبیل نور خورشید و نور لامپ و .... وجود دارد که به شدت داخل سنسور ها نویز می دازه و باعث یک شدن بی دلیل سنسور ها می شه
البته روش مرسومی در مسابقات هم هست (کسانی هم که مرض دارن داخل مسابقات میان کنار زمین یه نور مادون قرمز می تابونند زیر رباتت که داره راه می ره و رباتت قاطی می کنه تو این حالت دوست داری بری یارو رو خفه کنی )
)
شما بیا خروجی رو که به ال ای دی ir وصل کردی 1 کیلو هرتز بده :agree:
بعد تو گیرنده بگو اگه 1 کیلو بود کار کنه :agree:
ولی اگه یک بود و فرکانس نداشت همون حالت صفر رو در نظر بگیره :icon_razz:
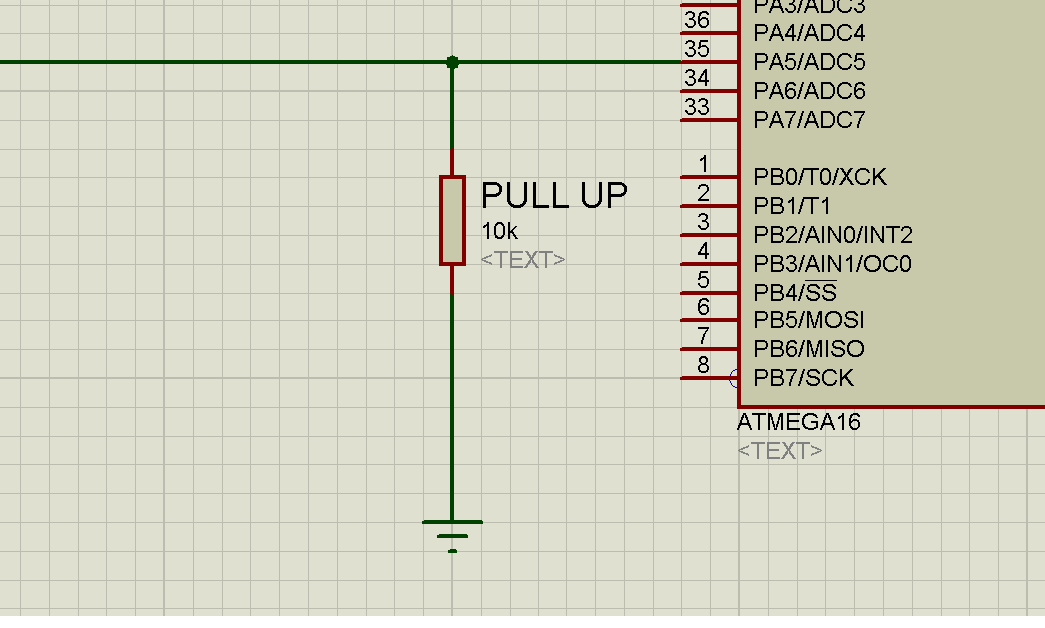
در مورد مقاومت پول پ هم باید بگم که اون دوستمون هم درست می گن و کلا خیلی فرقیس نداره ولی مرسوم این هست که مقاومت رو به زمین وصل می کنن oo:
oo:
با امید موفقیت شما
یا علی
ممنون دوست عزیز. میتونین یه کم بیشتر توضیح بدینکه طور اینکارو بکنم؟ مگه اینهایی که تو مسابقات رباتهای مسیریاب شرکت میکنن این کارو میکنن؟ چه لزومی داره یعنی چه مزایایی داره؟
از همه دوستان که لطف کردن و راهنماییم کردن صمیمانه تشکر میکنم
از همه دوستان که لطف کردن و راهنماییم کردن صمیمانه تشکر میکنم
نگا کن دوست عزیز چون در اطراف ما امواج مادون قرمز زیادی از قبیل نور خورشید و نور لامپ و .... وجود دارد که به شدت داخل سنسور ها نویز می دازه و باعث یک شدن بی دلیل سنسور ها می شه
البته روش مرسومی در مسابقات هم هست (کسانی هم که مرض دارن داخل مسابقات میان کنار زمین یه نور مادون قرمز می تابونند زیر رباتت که داره راه می ره و رباتت قاطی می کنه تو این حالت دوست داری بری یارو رو خفه کنی
)شما بیا خروجی رو که به ال ای دی ir وصل کردی 1 کیلو هرتز بده :agree:
بعد تو گیرنده بگو اگه 1 کیلو بود کار کنه :agree:
ولی اگه یک بود و فرکانس نداشت همون حالت صفر رو در نظر بگیره :icon_razz:
در مورد مقاومت پول پ هم باید بگم که اون دوستمون هم درست می گن و کلا خیلی فرقیس نداره ولی مرسوم این هست که مقاومت رو به زمین وصل می کنن
oo:با امید موفقیت شما
یا علی








دیدگاه