ساختار برنامه شما درست نیست ... و مشخص است که برنامه خوب کار نمیکنه ...
ببینید دوستان
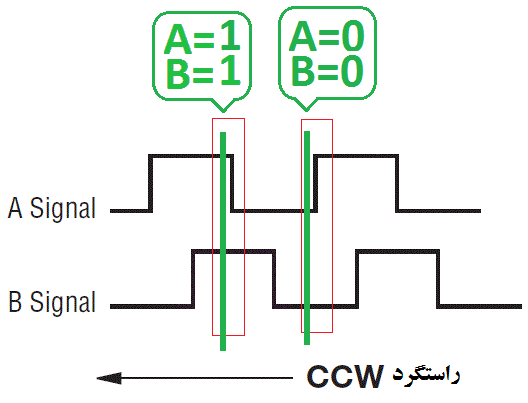
شکل خروجی انکدر اینجوریه ...
حالا ما باید یه جوری این سیگنال ها رو شمارش کنیم ...
اگر در شکل بالا تنها فاز A را به وقفه حساس به لبه متصل کنیم و فاز B را به پایه ورودی معمولی وصل کنیم ، 4حالت پدید می آید :
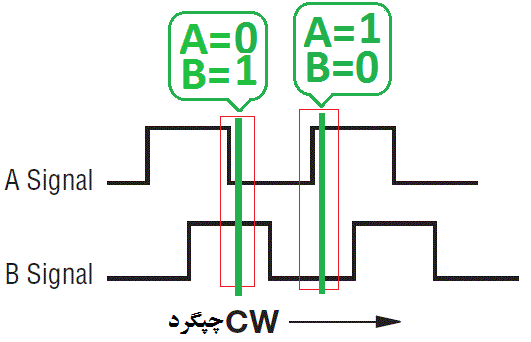
زمانی که راستگرد باشد دو حالت پیش می آید :
زمانی که چپگرد باشد دو حالت پیش می آید :
توی زیر برنامه وقفه دو تا شرط می گذاریم
اگر ورودی ها مخالف بودند یکی کم کن
در غیر این صورت یکی اضاف کن ...
با دستور XOR میشه این کار رو کرد
این کار رو شما بکنید همیشه میتوانید از موقعیت موتور با خبر باشید ...





دیدگاه