

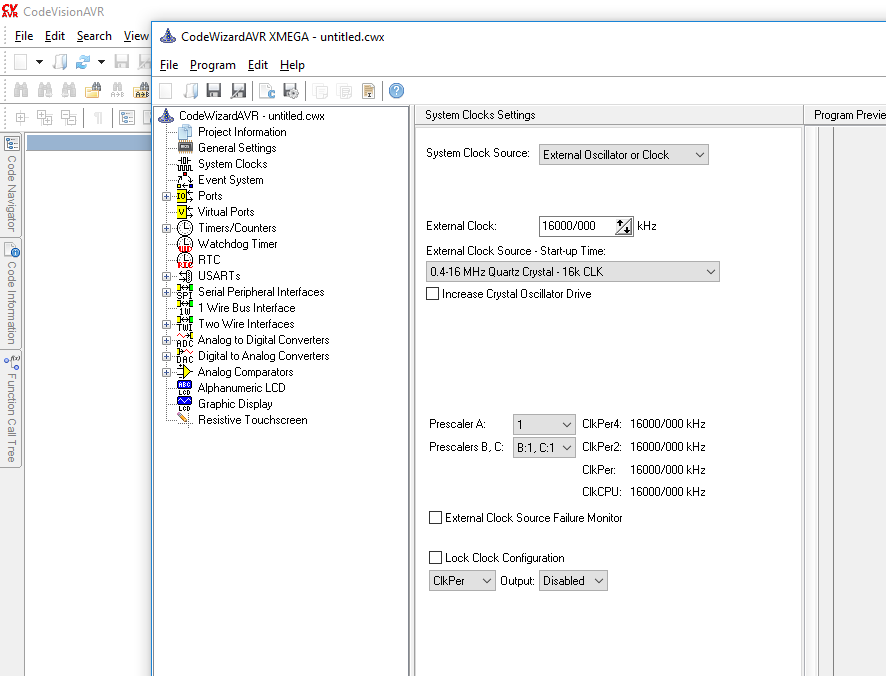
سلام دوستان من یه برنامه با ویزارد کدویژن میخاستم بنویسم تا چندتا پین PORTA رو روشن خاموش کنه ولی برنامه رو بدون خطا پروگرم میکنم ولی اجرا نمیشه!؟؟
نمیدونم مشکل از کدمه یا تنظیمات نوسان ساز ؟

نمیدونم مشکل از کدمه یا تنظیمات نوسان ساز ؟
کد:
// I/O Registers definitions
#include <io.h>
#include <delay.h>
// Declare your global variables here
// System Clocks initialization
void system_clocks_init(void)
{
unsigned char n,s;
// Optimize for speed
#pragma optsize-
// Save interrupts enabled/disabled state
s=SREG;
// Disable interrupts
#asm("cli")
// External 16000/000 kHz oscillator initialization
// Crystal oscillator increased drive current: Off
// External Clock Source - Startup Time: 0.4-16 MHz Quartz Crystal - 16k CLK
OSC.XOSCCTRL=OSC_FRQRANGE_12TO16_gc | OSC_XOSCSEL_XTAL_16KCLK_gc;
// Enable the external oscillator/clock source
OSC.CTRL|=OSC_XOSCEN_bm;
// System Clock prescaler A division factor: 1
// System Clock prescalers B & C division factors: B:1, C:1
// ClkPer4: 16000/000 kHz
// ClkPer2: 16000/000 kHz
// ClkPer: 16000/000 kHz
// ClkCPU: 16000/000 kHz
n=(CLK.PSCTRL & (~(CLK_PSADIV_gm | CLK_PSBCDIV1_bm | CLK_PSBCDIV0_bm))) |
CLK_PSADIV_1_gc | CLK_PSBCDIV_1_1_gc;
CCP=CCP_IOREG_gc;
CLK.PSCTRL=n;
// Wait for the external oscillator to stabilize
while ((OSC.STATUS & OSC_XOSCRDY_bm)==0);
// Select the system clock source: External Oscillator or Clock
n=(CLK.CTRL & (~CLK_SCLKSEL_gm)) | CLK_SCLKSEL_XOSC_gc;
CCP=CCP_IOREG_gc;
CLK.CTRL=n;
// Disable the unused oscillators: 2 MHz, 32 MHz, internal 32 kHz, PLL
OSC.CTRL&= ~(OSC_RC2MEN_bm | OSC_RC32MEN_bm | OSC_RC32KEN_bm | OSC_PLLEN_bm);
// ClkPer output disabled
PORTCFG.CLKEVOUT&= ~(PORTCFG_CLKOUTSEL_gm | PORTCFG_CLKOUT_gm);
// Restore interrupts enabled/disabled state
SREG=s;
// Restore optimization for size if needed
#pragma optsize_default
}
// Event System initialization
void event_system_init(void)
{
// Event System Channel 0 source: None
EVSYS.CH0MUX=EVSYS_CHMUX_OFF_gc;
// Event System Channel 1 source: None
EVSYS.CH1MUX=EVSYS_CHMUX_OFF_gc;
// Event System Channel 2 source: None
EVSYS.CH2MUX=EVSYS_CHMUX_OFF_gc;
// Event System Channel 3 source: None
EVSYS.CH3MUX=EVSYS_CHMUX_OFF_gc;
// Event System Channel 4 source: None
EVSYS.CH4MUX=EVSYS_CHMUX_OFF_gc;
// Event System Channel 5 source: None
EVSYS.CH5MUX=EVSYS_CHMUX_OFF_gc;
// Event System Channel 6 source: None
EVSYS.CH6MUX=EVSYS_CHMUX_OFF_gc;
// Event System Channel 7 source: None
EVSYS.CH7MUX=EVSYS_CHMUX_OFF_gc;
// Event System Channel 0 Digital Filter Coefficient: 1 Sample
// Quadrature Decoder: Off
EVSYS.CH0CTRL=(EVSYS.CH0CTRL & (~(EVSYS_QDIRM_gm | EVSYS_QDIEN_bm | EVSYS_QDEN_bm | EVSYS_DIGFILT_gm))) |
EVSYS_DIGFILT_1SAMPLE_gc;
// Event System Channel 1 Digital Filter Coefficient: 1 Sample
EVSYS.CH1CTRL=EVSYS_DIGFILT_1SAMPLE_gc;
// Event System Channel 2 Digital Filter Coefficient: 1 Sample
// Quadrature Decoder: Off
EVSYS.CH2CTRL=(EVSYS.CH2CTRL & (~(EVSYS_QDIRM_gm | EVSYS_QDIEN_bm | EVSYS_QDEN_bm | EVSYS_DIGFILT_gm))) |
EVSYS_DIGFILT_1SAMPLE_gc;
// Event System Channel 3 Digital Filter Coefficient: 1 Sample
EVSYS.CH3CTRL=EVSYS_DIGFILT_1SAMPLE_gc;
// Event System Channel 4 Digital Filter Coefficient: 1 Sample
// Quadrature Decoder: Off
EVSYS.CH4CTRL=(EVSYS.CH4CTRL & (~(EVSYS_QDIRM_gm | EVSYS_QDIEN_bm | EVSYS_QDEN_bm | EVSYS_DIGFILT_gm))) |
EVSYS_DIGFILT_1SAMPLE_gc;
// Event System Channel 5 Digital Filter Coefficient: 1 Sample
EVSYS.CH5CTRL=EVSYS_DIGFILT_1SAMPLE_gc;
// Event System Channel 6 Digital Filter Coefficient: 1 Sample
EVSYS.CH6CTRL=EVSYS_DIGFILT_1SAMPLE_gc;
// Event System Channel 7 Digital Filter Coefficient: 1 Sample
EVSYS.CH7CTRL=EVSYS_DIGFILT_1SAMPLE_gc;
// Event System Channel output: Disabled
PORTCFG.CLKEVOUT&= ~PORTCFG_EVOUT_gm;
PORTCFG.EVOUTSEL&= ~PORTCFG_EVOUTSEL_gm;
}
// Ports initialization
void ports_init(void)
{
// PORTA initialization
// OUT register
PORTA.OUT=0x00;
// Pin0: Output
// Pin1: Output
// Pin2: Output
// Pin3: Output
// Pin4: Input
// Pin5: Input
// Pin6: Input
// Pin7: Input
PORTA.DIR=0x0F;
// Pin0 Output/Pull configuration: Totempole/No
// Pin0 Input/Sense configuration: Sense both edges
// Pin0 Inverted: Off
// Pin0 Slew Rate Limitation: Off
PORTA.PIN0CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin1 Output/Pull configuration: Totempole/No
// Pin1 Input/Sense configuration: Sense both edges
// Pin1 Inverted: Off
// Pin1 Slew Rate Limitation: Off
PORTA.PIN1CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin2 Output/Pull configuration: Totempole/No
// Pin2 Input/Sense configuration: Sense both edges
// Pin2 Inverted: Off
// Pin2 Slew Rate Limitation: Off
PORTA.PIN2CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin3 Output/Pull configuration: Totempole/No
// Pin3 Input/Sense configuration: Sense both edges
// Pin3 Inverted: Off
// Pin3 Slew Rate Limitation: Off
PORTA.PIN3CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin4 Output/Pull configuration: Totempole/No
// Pin4 Input/Sense configuration: Sense both edges
// Pin4 Inverted: Off
// Pin4 Slew Rate Limitation: Off
PORTA.PIN4CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin5 Output/Pull configuration: Totempole/No
// Pin5 Input/Sense configuration: Sense both edges
// Pin5 Inverted: Off
// Pin5 Slew Rate Limitation: Off
PORTA.PIN5CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin6 Output/Pull configuration: Totempole/No
// Pin6 Input/Sense configuration: Sense both edges
// Pin6 Inverted: Off
// Pin6 Slew Rate Limitation: Off
PORTA.PIN6CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin7 Output/Pull configuration: Totempole/No
// Pin7 Input/Sense configuration: Sense both edges
// Pin7 Inverted: Off
// Pin7 Slew Rate Limitation: Off
PORTA.PIN7CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Interrupt 0 level: Disabled
// Interrupt 1 level: Disabled
PORTA.INTCTRL=(PORTA.INTCTRL & (~(PORT_INT1LVL_gm | PORT_INT0LVL_gm))) |
PORT_INT1LVL_OFF_gc | PORT_INT0LVL_OFF_gc;
// Pin0 Pin Change interrupt 0: Off
// Pin1 Pin Change interrupt 0: Off
// Pin2 Pin Change interrupt 0: Off
// Pin3 Pin Change interrupt 0: Off
// Pin4 Pin Change interrupt 0: Off
// Pin5 Pin Change interrupt 0: Off
// Pin6 Pin Change interrupt 0: Off
// Pin7 Pin Change interrupt 0: Off
PORTA.INT0MASK=0x00;
// Pin0 Pin Change interrupt 1: Off
// Pin1 Pin Change interrupt 1: Off
// Pin2 Pin Change interrupt 1: Off
// Pin3 Pin Change interrupt 1: Off
// Pin4 Pin Change interrupt 1: Off
// Pin5 Pin Change interrupt 1: Off
// Pin6 Pin Change interrupt 1: Off
// Pin7 Pin Change interrupt 1: Off
PORTA.INT1MASK=0x00;
// PORTB initialization
// OUT register
PORTB.OUT=0x00;
// Pin0: Input
// Pin1: Input
// Pin2: Input
// Pin3: Input
// Pin4: Input
// Pin5: Input
// Pin6: Input
// Pin7: Input
PORTB.DIR=0x00;
// Pin0 Output/Pull configuration: Totempole/No
// Pin0 Input/Sense configuration: Sense both edges
// Pin0 Inverted: Off
// Pin0 Slew Rate Limitation: Off
PORTB.PIN0CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin1 Output/Pull configuration: Totempole/No
// Pin1 Input/Sense configuration: Sense both edges
// Pin1 Inverted: Off
// Pin1 Slew Rate Limitation: Off
PORTB.PIN1CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin2 Output/Pull configuration: Totempole/No
// Pin2 Input/Sense configuration: Sense both edges
// Pin2 Inverted: Off
// Pin2 Slew Rate Limitation: Off
PORTB.PIN2CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin3 Output/Pull configuration: Totempole/No
// Pin3 Input/Sense configuration: Sense both edges
// Pin3 Inverted: Off
// Pin3 Slew Rate Limitation: Off
PORTB.PIN3CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin4 Output/Pull configuration: Totempole/No
// Pin4 Input/Sense configuration: Sense both edges
// Pin4 Inverted: Off
// Pin4 Slew Rate Limitation: Off
PORTB.PIN4CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin5 Output/Pull configuration: Totempole/No
// Pin5 Input/Sense configuration: Sense both edges
// Pin5 Inverted: Off
// Pin5 Slew Rate Limitation: Off
PORTB.PIN5CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin6 Output/Pull configuration: Totempole/No
// Pin6 Input/Sense configuration: Sense both edges
// Pin6 Inverted: Off
// Pin6 Slew Rate Limitation: Off
PORTB.PIN6CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin7 Output/Pull configuration: Totempole/No
// Pin7 Input/Sense configuration: Sense both edges
// Pin7 Inverted: Off
// Pin7 Slew Rate Limitation: Off
PORTB.PIN7CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Interrupt 0 level: Disabled
// Interrupt 1 level: Disabled
PORTB.INTCTRL=(PORTB.INTCTRL & (~(PORT_INT1LVL_gm | PORT_INT0LVL_gm))) |
PORT_INT1LVL_OFF_gc | PORT_INT0LVL_OFF_gc;
// Pin0 Pin Change interrupt 0: Off
// Pin1 Pin Change interrupt 0: Off
// Pin2 Pin Change interrupt 0: Off
// Pin3 Pin Change interrupt 0: Off
// Pin4 Pin Change interrupt 0: Off
// Pin5 Pin Change interrupt 0: Off
// Pin6 Pin Change interrupt 0: Off
// Pin7 Pin Change interrupt 0: Off
PORTB.INT0MASK=0x00;
// Pin0 Pin Change interrupt 1: Off
// Pin1 Pin Change interrupt 1: Off
// Pin2 Pin Change interrupt 1: Off
// Pin3 Pin Change interrupt 1: Off
// Pin4 Pin Change interrupt 1: Off
// Pin5 Pin Change interrupt 1: Off
// Pin6 Pin Change interrupt 1: Off
// Pin7 Pin Change interrupt 1: Off
PORTB.INT1MASK=0x00;
// PORTC initialization
// OUT register
PORTC.OUT=0x00;
// Pin0: Input
// Pin1: Input
// Pin2: Input
// Pin3: Input
// Pin4: Input
// Pin5: Input
// Pin6: Input
// Pin7: Input
PORTC.DIR=0x00;
// Pin0 Output/Pull configuration: Totempole/No
// Pin0 Input/Sense configuration: Sense both edges
// Pin0 Inverted: Off
// Pin0 Slew Rate Limitation: Off
PORTC.PIN0CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin1 Output/Pull configuration: Totempole/No
// Pin1 Input/Sense configuration: Sense both edges
// Pin1 Inverted: Off
// Pin1 Slew Rate Limitation: Off
PORTC.PIN1CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin2 Output/Pull configuration: Totempole/No
// Pin2 Input/Sense configuration: Sense both edges
// Pin2 Inverted: Off
// Pin2 Slew Rate Limitation: Off
PORTC.PIN2CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin3 Output/Pull configuration: Totempole/No
// Pin3 Input/Sense configuration: Sense both edges
// Pin3 Inverted: Off
// Pin3 Slew Rate Limitation: Off
PORTC.PIN3CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin4 Output/Pull configuration: Totempole/No
// Pin4 Input/Sense configuration: Sense both edges
// Pin4 Inverted: Off
// Pin4 Slew Rate Limitation: Off
PORTC.PIN4CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin5 Output/Pull configuration: Totempole/No
// Pin5 Input/Sense configuration: Sense both edges
// Pin5 Inverted: Off
// Pin5 Slew Rate Limitation: Off
PORTC.PIN5CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin6 Output/Pull configuration: Totempole/No
// Pin6 Input/Sense configuration: Sense both edges
// Pin6 Inverted: Off
// Pin6 Slew Rate Limitation: Off
PORTC.PIN6CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin7 Output/Pull configuration: Totempole/No
// Pin7 Input/Sense configuration: Sense both edges
// Pin7 Inverted: Off
// Pin7 Slew Rate Limitation: Off
PORTC.PIN7CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// PORTC Peripheral Output Remapping
// OC0A Output: Pin 0
// OC0B Output: Pin 1
// OC0C Output: Pin 2
// OC0D Output: Pin 3
// USART0 XCK: Pin 1
// USART0 RXD: Pin 2
// USART0 TXD: Pin 3
// SPI MOSI: Pin 5
// SPI SCK: Pin 7
PORTC.REMAP=(0<<PORT_SPI_bp) | (0<<PORT_USART0_bp) | (0<<PORT_TC0D_bp) | (0<<PORT_TC0C_bp) | (0<<PORT_TC0B_bp) | (0<<PORT_TC0A_bp);
// Interrupt 0 level: Disabled
// Interrupt 1 level: Disabled
PORTC.INTCTRL=(PORTC.INTCTRL & (~(PORT_INT1LVL_gm | PORT_INT0LVL_gm))) |
PORT_INT1LVL_OFF_gc | PORT_INT0LVL_OFF_gc;
// Pin0 Pin Change interrupt 0: Off
// Pin1 Pin Change interrupt 0: Off
// Pin2 Pin Change interrupt 0: Off
// Pin3 Pin Change interrupt 0: Off
// Pin4 Pin Change interrupt 0: Off
// Pin5 Pin Change interrupt 0: Off
// Pin6 Pin Change interrupt 0: Off
// Pin7 Pin Change interrupt 0: Off
PORTC.INT0MASK=0x00;
// Pin0 Pin Change interrupt 1: Off
// Pin1 Pin Change interrupt 1: Off
// Pin2 Pin Change interrupt 1: Off
// Pin3 Pin Change interrupt 1: Off
// Pin4 Pin Change interrupt 1: Off
// Pin5 Pin Change interrupt 1: Off
// Pin6 Pin Change interrupt 1: Off
// Pin7 Pin Change interrupt 1: Off
PORTC.INT1MASK=0x00;
// PORTD initialization
// OUT register
PORTD.OUT=0x00;
// Pin0: Input
// Pin1: Input
// Pin2: Input
// Pin3: Input
// Pin4: Input
// Pin5: Input
// Pin6: Input
// Pin7: Input
PORTD.DIR=0x00;
// Pin0 Output/Pull configuration: Totempole/No
// Pin0 Input/Sense configuration: Sense both edges
// Pin0 Inverted: Off
// Pin0 Slew Rate Limitation: Off
PORTD.PIN0CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin1 Output/Pull configuration: Totempole/No
// Pin1 Input/Sense configuration: Sense both edges
// Pin1 Inverted: Off
// Pin1 Slew Rate Limitation: Off
PORTD.PIN1CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin2 Output/Pull configuration: Totempole/No
// Pin2 Input/Sense configuration: Sense both edges
// Pin2 Inverted: Off
// Pin2 Slew Rate Limitation: Off
PORTD.PIN2CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin3 Output/Pull configuration: Totempole/No
// Pin3 Input/Sense configuration: Sense both edges
// Pin3 Inverted: Off
// Pin3 Slew Rate Limitation: Off
PORTD.PIN3CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin4 Output/Pull configuration: Totempole/No
// Pin4 Input/Sense configuration: Sense both edges
// Pin4 Inverted: Off
// Pin4 Slew Rate Limitation: Off
PORTD.PIN4CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin5 Output/Pull configuration: Totempole/No
// Pin5 Input/Sense configuration: Sense both edges
// Pin5 Inverted: Off
// Pin5 Slew Rate Limitation: Off
PORTD.PIN5CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin6 Output/Pull configuration: Totempole/No
// Pin6 Input/Sense configuration: Sense both edges
// Pin6 Inverted: Off
// Pin6 Slew Rate Limitation: Off
PORTD.PIN6CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin7 Output/Pull configuration: Totempole/No
// Pin7 Input/Sense configuration: Sense both edges
// Pin7 Inverted: Off
// Pin7 Slew Rate Limitation: Off
PORTD.PIN7CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Interrupt 0 level: Disabled
// Interrupt 1 level: Disabled
PORTD.INTCTRL=(PORTD.INTCTRL & (~(PORT_INT1LVL_gm | PORT_INT0LVL_gm))) |
PORT_INT1LVL_OFF_gc | PORT_INT0LVL_OFF_gc;
// Pin0 Pin Change interrupt 0: Off
// Pin1 Pin Change interrupt 0: Off
// Pin2 Pin Change interrupt 0: Off
// Pin3 Pin Change interrupt 0: Off
// Pin4 Pin Change interrupt 0: Off
// Pin5 Pin Change interrupt 0: Off
// Pin6 Pin Change interrupt 0: Off
// Pin7 Pin Change interrupt 0: Off
PORTD.INT0MASK=0x00;
// Pin0 Pin Change interrupt 1: Off
// Pin1 Pin Change interrupt 1: Off
// Pin2 Pin Change interrupt 1: Off
// Pin3 Pin Change interrupt 1: Off
// Pin4 Pin Change interrupt 1: Off
// Pin5 Pin Change interrupt 1: Off
// Pin6 Pin Change interrupt 1: Off
// Pin7 Pin Change interrupt 1: Off
PORTD.INT1MASK=0x00;
// PORTE initialization
// OUT register
PORTE.OUT=0x00;
// Pin0: Input
// Pin1: Input
// Pin2: Input
// Pin3: Input
// Pin4: Input
// Pin5: Input
// Pin6: Input
// Pin7: Input
PORTE.DIR=0x00;
// Pin0 Output/Pull configuration: Totempole/No
// Pin0 Input/Sense configuration: Sense both edges
// Pin0 Inverted: Off
// Pin0 Slew Rate Limitation: Off
PORTE.PIN0CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin1 Output/Pull configuration: Totempole/No
// Pin1 Input/Sense configuration: Sense both edges
// Pin1 Inverted: Off
// Pin1 Slew Rate Limitation: Off
PORTE.PIN1CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin2 Output/Pull configuration: Totempole/No
// Pin2 Input/Sense configuration: Sense both edges
// Pin2 Inverted: Off
// Pin2 Slew Rate Limitation: Off
PORTE.PIN2CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin3 Output/Pull configuration: Totempole/No
// Pin3 Input/Sense configuration: Sense both edges
// Pin3 Inverted: Off
// Pin3 Slew Rate Limitation: Off
PORTE.PIN3CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin4 Output/Pull configuration: Totempole/No
// Pin4 Input/Sense configuration: Sense both edges
// Pin4 Inverted: Off
// Pin4 Slew Rate Limitation: Off
PORTE.PIN4CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin5 Output/Pull configuration: Totempole/No
// Pin5 Input/Sense configuration: Sense both edges
// Pin5 Inverted: Off
// Pin5 Slew Rate Limitation: Off
PORTE.PIN5CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin6 Output/Pull configuration: Totempole/No
// Pin6 Input/Sense configuration: Sense both edges
// Pin6 Inverted: Off
// Pin6 Slew Rate Limitation: Off
PORTE.PIN6CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin7 Output/Pull configuration: Totempole/No
// Pin7 Input/Sense configuration: Sense both edges
// Pin7 Inverted: Off
// Pin7 Slew Rate Limitation: Off
PORTE.PIN7CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Interrupt 0 level: Disabled
// Interrupt 1 level: Disabled
PORTE.INTCTRL=(PORTE.INTCTRL & (~(PORT_INT1LVL_gm | PORT_INT0LVL_gm))) |
PORT_INT1LVL_OFF_gc | PORT_INT0LVL_OFF_gc;
// Pin0 Pin Change interrupt 0: Off
// Pin1 Pin Change interrupt 0: Off
// Pin2 Pin Change interrupt 0: Off
// Pin3 Pin Change interrupt 0: Off
// Pin4 Pin Change interrupt 0: Off
// Pin5 Pin Change interrupt 0: Off
// Pin6 Pin Change interrupt 0: Off
// Pin7 Pin Change interrupt 0: Off
PORTE.INT0MASK=0x00;
// Pin0 Pin Change interrupt 1: Off
// Pin1 Pin Change interrupt 1: Off
// Pin2 Pin Change interrupt 1: Off
// Pin3 Pin Change interrupt 1: Off
// Pin4 Pin Change interrupt 1: Off
// Pin5 Pin Change interrupt 1: Off
// Pin6 Pin Change interrupt 1: Off
// Pin7 Pin Change interrupt 1: Off
PORTE.INT1MASK=0x00;
// PORTF initialization
// OUT register
PORTF.OUT=0x00;
// Pin0: Input
// Pin1: Input
// Pin2: Input
// Pin3: Input
// Pin4: Input
// Pin5: Input
// Pin6: Input
// Pin7: Input
PORTF.DIR=0x00;
// Pin0 Output/Pull configuration: Totempole/No
// Pin0 Input/Sense configuration: Sense both edges
// Pin0 Inverted: Off
// Pin0 Slew Rate Limitation: Off
PORTF.PIN0CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin1 Output/Pull configuration: Totempole/No
// Pin1 Input/Sense configuration: Sense both edges
// Pin1 Inverted: Off
// Pin1 Slew Rate Limitation: Off
PORTF.PIN1CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin2 Output/Pull configuration: Totempole/No
// Pin2 Input/Sense configuration: Sense both edges
// Pin2 Inverted: Off
// Pin2 Slew Rate Limitation: Off
PORTF.PIN2CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin3 Output/Pull configuration: Totempole/No
// Pin3 Input/Sense configuration: Sense both edges
// Pin3 Inverted: Off
// Pin3 Slew Rate Limitation: Off
PORTF.PIN3CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin4 Output/Pull configuration: Totempole/No
// Pin4 Input/Sense configuration: Sense both edges
// Pin4 Inverted: Off
// Pin4 Slew Rate Limitation: Off
PORTF.PIN4CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin5 Output/Pull configuration: Totempole/No
// Pin5 Input/Sense configuration: Sense both edges
// Pin5 Inverted: Off
// Pin5 Slew Rate Limitation: Off
PORTF.PIN5CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin6 Output/Pull configuration: Totempole/No
// Pin6 Input/Sense configuration: Sense both edges
// Pin6 Inverted: Off
// Pin6 Slew Rate Limitation: Off
PORTF.PIN6CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin7 Output/Pull configuration: Totempole/No
// Pin7 Input/Sense configuration: Sense both edges
// Pin7 Inverted: Off
// Pin7 Slew Rate Limitation: Off
PORTF.PIN7CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Interrupt 0 level: Disabled
// Interrupt 1 level: Disabled
PORTF.INTCTRL=(PORTF.INTCTRL & (~(PORT_INT1LVL_gm | PORT_INT0LVL_gm))) |
PORT_INT1LVL_OFF_gc | PORT_INT0LVL_OFF_gc;
// Pin0 Pin Change interrupt 0: Off
// Pin1 Pin Change interrupt 0: Off
// Pin2 Pin Change interrupt 0: Off
// Pin3 Pin Change interrupt 0: Off
// Pin4 Pin Change interrupt 0: Off
// Pin5 Pin Change interrupt 0: Off
// Pin6 Pin Change interrupt 0: Off
// Pin7 Pin Change interrupt 0: Off
PORTF.INT0MASK=0x00;
// Pin0 Pin Change interrupt 1: Off
// Pin1 Pin Change interrupt 1: Off
// Pin2 Pin Change interrupt 1: Off
// Pin3 Pin Change interrupt 1: Off
// Pin4 Pin Change interrupt 1: Off
// Pin5 Pin Change interrupt 1: Off
// Pin6 Pin Change interrupt 1: Off
// Pin7 Pin Change interrupt 1: Off
PORTF.INT1MASK=0x00;
// PORTR initialization
// OUT register
PORTR.OUT=0x00;
// Pin0: Input
// Pin1: Input
PORTR.DIR=0x00;
// Pin0 Output/Pull configuration: Totempole/No
// Pin0 Input/Sense configuration: Sense both edges
// Pin0 Inverted: Off
// Pin0 Slew Rate Limitation: Off
PORTR.PIN0CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Pin1 Output/Pull configuration: Totempole/No
// Pin1 Input/Sense configuration: Sense both edges
// Pin1 Inverted: Off
// Pin1 Slew Rate Limitation: Off
PORTR.PIN1CTRL=PORT_OPC_TOTEM_gc | PORT_ISC_BOTHEDGES_gc;
// Interrupt 0 level: Disabled
// Interrupt 1 level: Disabled
PORTR.INTCTRL=(PORTR.INTCTRL & (~(PORT_INT1LVL_gm | PORT_INT0LVL_gm))) |
PORT_INT1LVL_OFF_gc | PORT_INT0LVL_OFF_gc;
// Pin0 Pin Change interrupt 0: Off
// Pin1 Pin Change interrupt 0: Off
PORTR.INT0MASK=0x00;
// Pin0 Pin Change interrupt 1: Off
// Pin1 Pin Change interrupt 1: Off
PORTR.INT1MASK=0x00;
}
// Virtual Ports initialization
void vports_init(void)
{
// PORTA mapped to VPORT0
// PORTB mapped to VPORT1
PORTCFG.VPCTRLA=PORTCFG_VP13MAP_PORTB_gc | PORTCFG_VP02MAP_PORTA_gc;
// PORTC mapped to VPORT2
// PORTD mapped to VPORT3
PORTCFG.VPCTRLB=PORTCFG_VP13MAP_PORTD_gc | PORTCFG_VP02MAP_PORTC_gc;
}
void main(void)
{
// Declare your local variables here
unsigned char n;
// Interrupt system initialization
// Optimize for speed
#pragma optsize-
// Make sure the interrupts are disabled
#asm("cli")
// Low level interrupt: Off
// Round-robin scheduling for low level interrupt: Off
// Medium level interrupt: Off
// High level interrupt: Off
// The interrupt vectors will be placed at the start of the Application FLASH section
n=(PMIC.CTRL & (~(PMIC_RREN_bm | PMIC_IVSEL_bm | PMIC_HILVLEN_bm | PMIC_MEDLVLEN_bm | PMIC_LOLVLEN_bm)));
CCP=CCP_IOREG_gc;
PMIC.CTRL=n;
// Set the default priority for round-robin scheduling
PMIC.INTPRI=0x00;
// Restore optimization for size if needed
#pragma optsize_default
// System clocks initialization
system_clocks_init();
// Event system initialization
event_system_init();
// Ports initialization
ports_init();
// Virtual Ports initialization
vports_init();
while (1)
{
PORTA.OUT=0x0F;
delay_ms(500);
PORTA.OUT=0x00;
delay_ms(500);
}
}




دیدگاه