

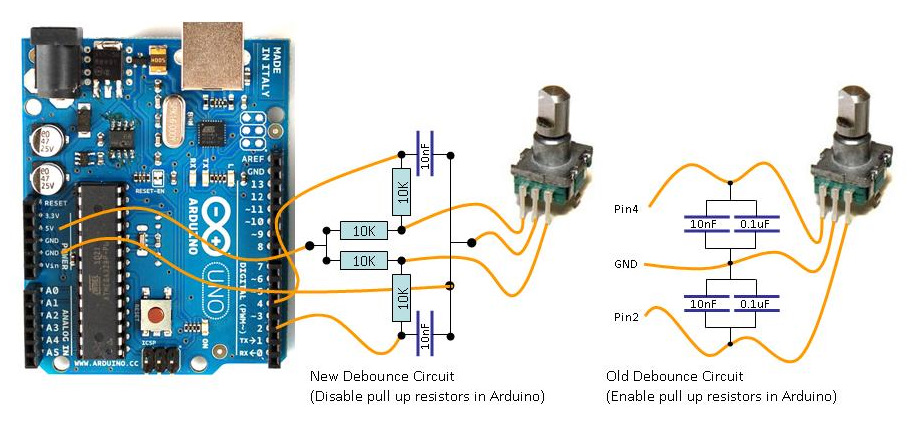
با سلام دوستان من در میکرو در دوتا از اینتراپتهای خارجی دارم پالس aوb را میخونم ولی نمیدونم چه کدی بنویسم تا تشخیص دهم که پالسaزودتر آمده یا b تا جهت رو متوجه بشم
اگه دوستان کار کردن و الگوریتمی دارن برام بگن ممنون میشم
interrupt [EXT_INT0] void ext_int0_isr(void){
if(PIND.1==1) {
voltage=voltage+1;
if(voltage_num_change>=201) voltage_num_change=201;
}
else {
voltage=voltage-1;
if(voltage_num_change<0 || voltage_num_change>202) voltage_num_change=0;
}
}

#int_EXT1
void EXT1_isr(void)
{
if(input(PIN_A14)==1)
{
Count_INC_Puls++;
if(Flag_Z_Puls==1)
{
Count_INC_Puls=0;
Flag_Z_Puls=0;
}
}
else
{
Count_INC_Puls--;
if(Flag_Z_Puls==1)
{
Count_INC_Puls=0;
Flag_Z_Puls=0;
}
}
fprintf(Com1,"%li \n",Count_INC_Puls);
}[img][img][img][img][img][/img][/img][/img][/img][/img]




دیدگاه