

سلام
این مدار درایور موتور DC منه؛ میکرو مرکزی SAM7S256 قرار داره.
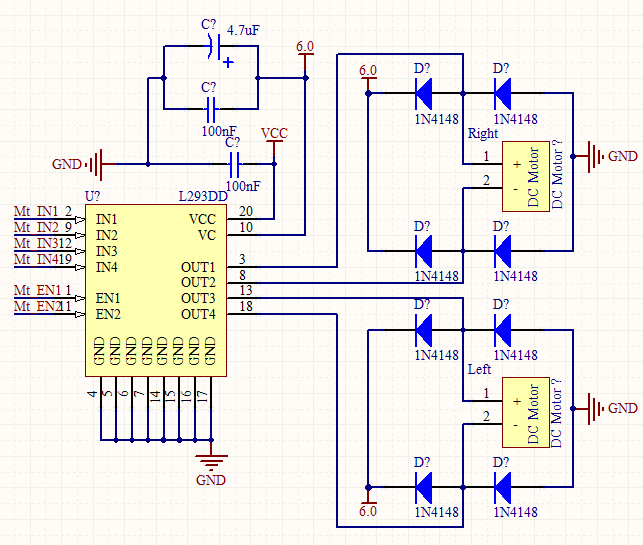
خوب حالا سئوالم اینه که چطور میتونم با PWM سیستمهای راستگرد و چپگرد رو براش بسازم؟!
من فکر میکردم که PWM داخل میکرو تولید میشه، و میشه اونرو از هر پایه ای که خواستیم، به درایور L293 برسونیم، اما الان گیج شدم! تو این میکرو (SAM7S256) پایه های PWM عبارتند از 44، 47، 48 هستند (به ترتیب PA0 PA1 PA2)، خوب الان باید این پایه ها رو به ورودیهای L293 وصل کنم؟ یا اینکه نه احتیاجی نیست؟ اگه قراره این پایه های رو وصل کنم... خوب... باید از ICهای TTL استفاده کنم؟ (چون 4 تا پین دارم که باید فعال بشن ولی نهایتا 3 تا خروجی PWM رو میکرو دارم)
دارم.... نه بابا دیگه قاط زدم :angry:، میکروم هنگ کرده، نمیدونم چرا واچ داگم سیستم رو ریست نمیکنه :cry:
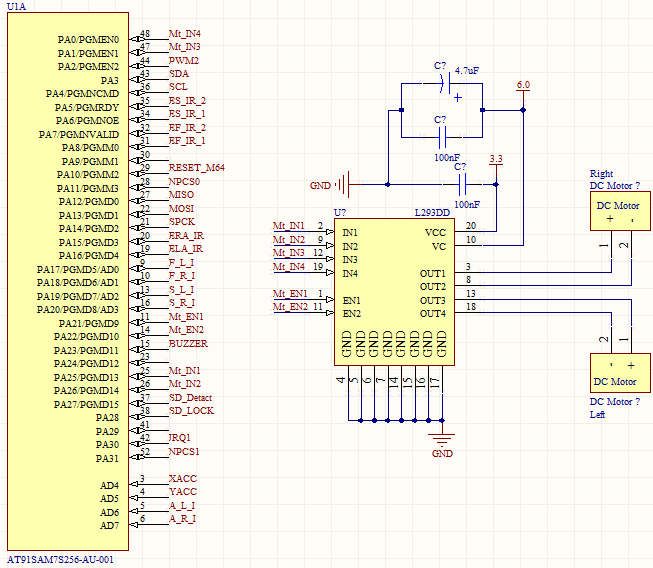
این مدار درایور موتور DC منه؛ میکرو مرکزی SAM7S256 قرار داره.
خوب حالا سئوالم اینه که چطور میتونم با PWM سیستمهای راستگرد و چپگرد رو براش بسازم؟!
من فکر میکردم که PWM داخل میکرو تولید میشه، و میشه اونرو از هر پایه ای که خواستیم، به درایور L293 برسونیم، اما الان گیج شدم! تو این میکرو (SAM7S256) پایه های PWM عبارتند از 44، 47، 48 هستند (به ترتیب PA0 PA1 PA2)، خوب الان باید این پایه ها رو به ورودیهای L293 وصل کنم؟ یا اینکه نه احتیاجی نیست؟ اگه قراره این پایه های رو وصل کنم... خوب... باید از ICهای TTL استفاده کنم؟ (چون 4 تا پین دارم که باید فعال بشن ولی نهایتا 3 تا خروجی PWM رو میکرو دارم)
دارم.... نه بابا دیگه قاط زدم :angry:، میکروم هنگ کرده، نمیدونم چرا واچ داگم سیستم رو ریست نمیکنه :cry:












 .
.


دیدگاه