

سلام به همه
چند مثال، دمو های خود سایت freeRTOS رو اجرا و تست و بالا پایین کردم، همه درست کار میکنن، برنامه ای که خودم نوشتم رو توی مثال ها قرار میدم درست جواب میده، از کتابخونه freertos خود keil استفاده میکنم برناممم درست اجرا میشه اما...
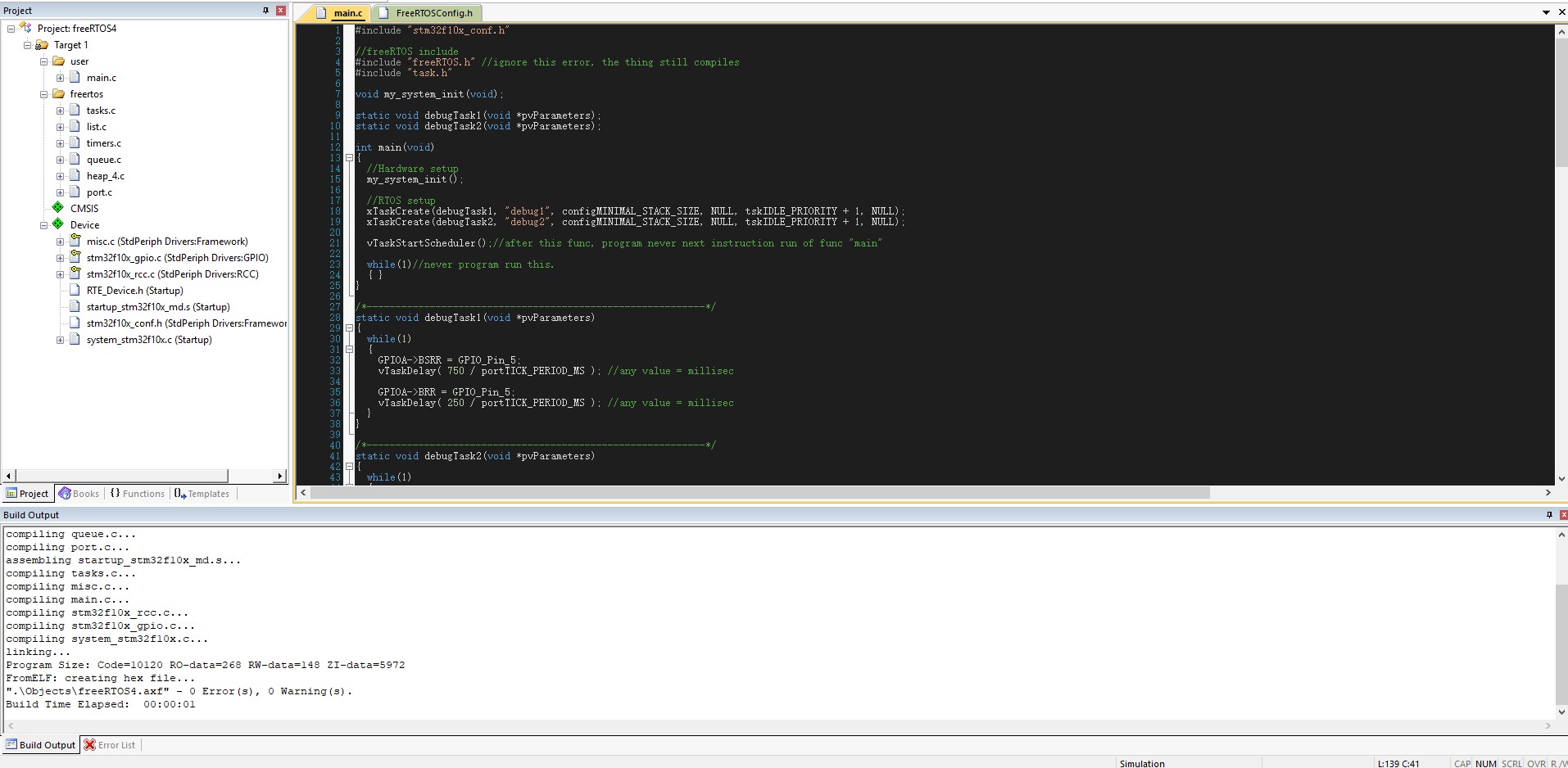
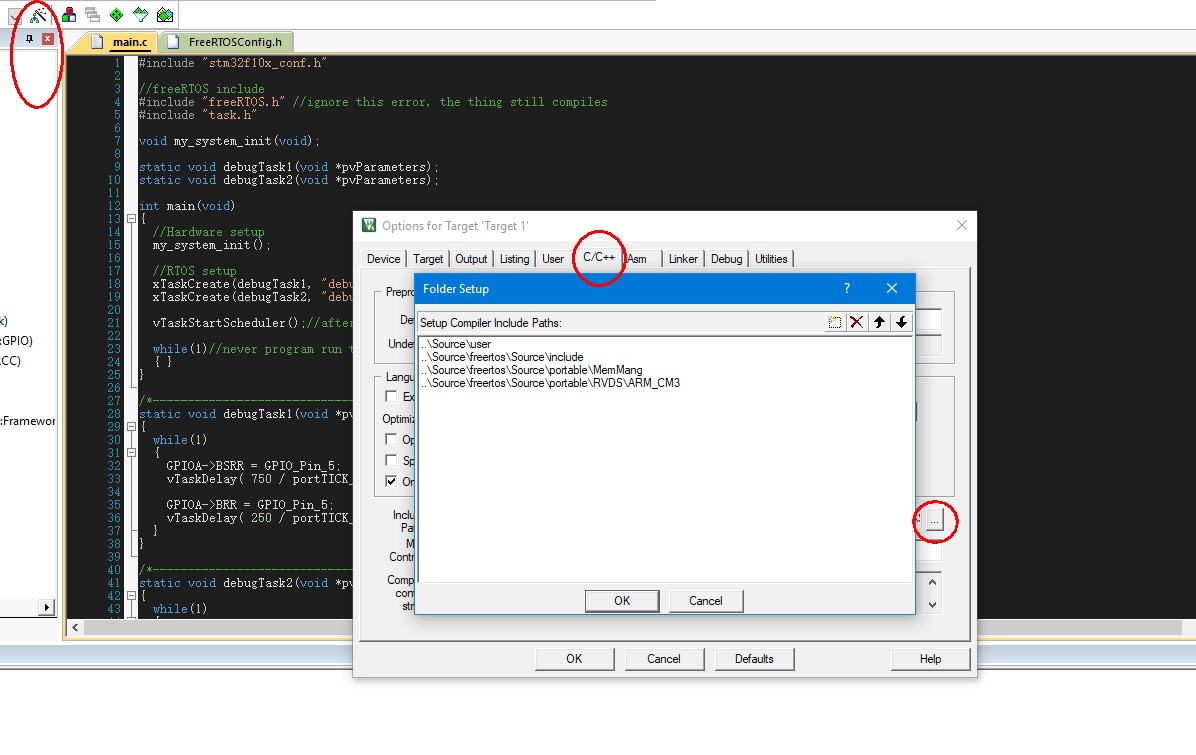
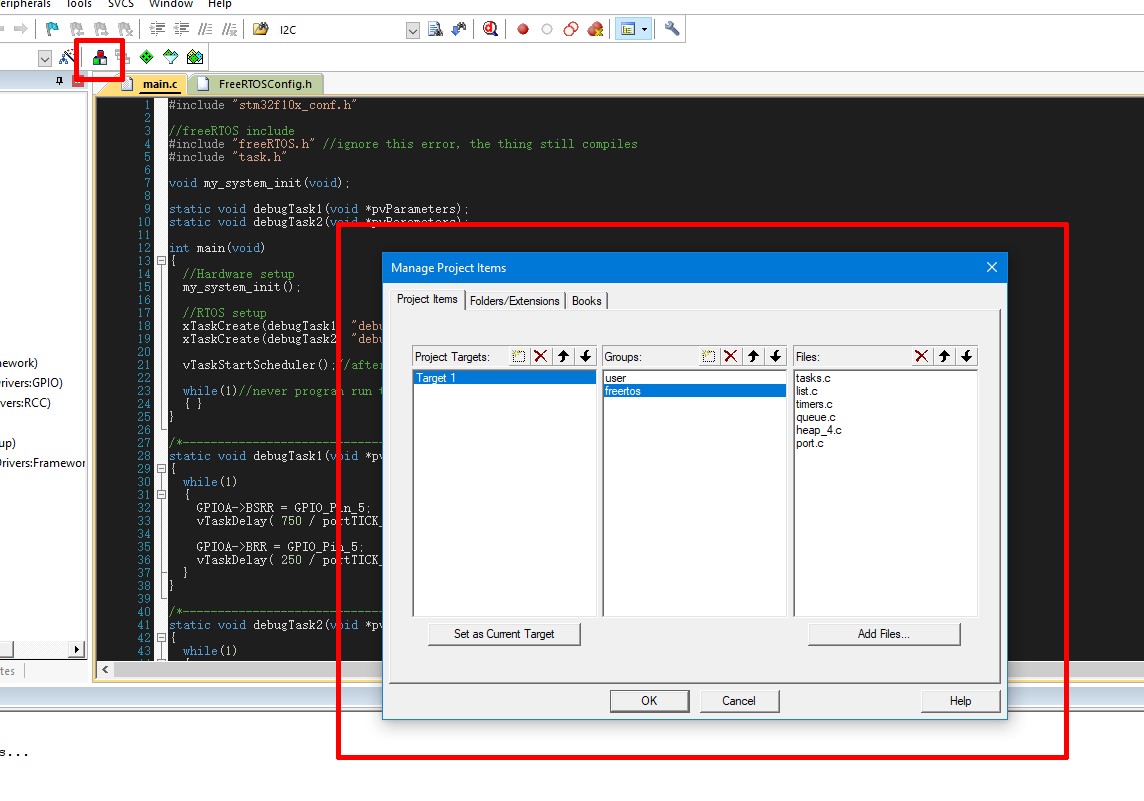
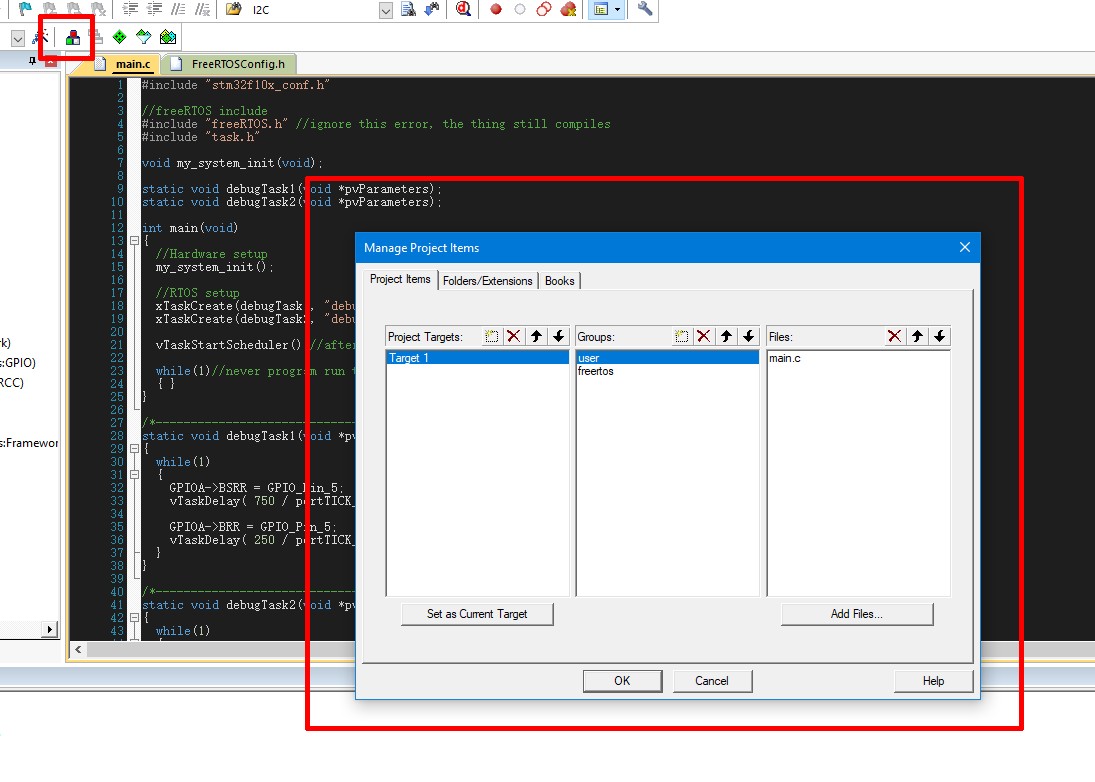
وقتی خودم یک پروژه توی کیل میسازم و کتابخونه های freertos رو از سایت خود freertos دانلود میکنم و توی برنامه اضافشون میکنم موقع کامپایل هم بدون error هست اما موقع اجرا به هیچکدوم از task ها پرش نمیکنه...
موخم تیلیت شده از بس گشتم توی سایت های مختلف.
این فایل freeRTOSConfig.h رو چجوری بنویسم بهتره؟
مشکلش چیهههههه!!!
نمونه فایل freeRTOSConfig.h که استفاده کردم:
دوستان کارم گیر راه اندازی freertos هستش اگر کسی میتونه کمکی کنه مشکلی با هزینش ندارم فقط کارم زودتر راه بیفته سه هفته شدههههههه 
چند مثال، دمو های خود سایت freeRTOS رو اجرا و تست و بالا پایین کردم، همه درست کار میکنن، برنامه ای که خودم نوشتم رو توی مثال ها قرار میدم درست جواب میده، از کتابخونه freertos خود keil استفاده میکنم برناممم درست اجرا میشه اما...
وقتی خودم یک پروژه توی کیل میسازم و کتابخونه های freertos رو از سایت خود freertos دانلود میکنم و توی برنامه اضافشون میکنم موقع کامپایل هم بدون error هست اما موقع اجرا به هیچکدوم از task ها پرش نمیکنه...
موخم تیلیت شده از بس گشتم توی سایت های مختلف.
#include <stdio.h>
#include <stdlib.h>
#include "stm32f10x_conf.h"
//freeRTOS include
#include "freeRTOS.h"
#include "task.h"
#include "queue.h"
#include "timers.h"
void my_system_init(void);
static void debugTask1(void *pvParameters);
static void debugTask2(void *pvParameters);
int main(void)
{
//Hardware setup
my_system_init();
//RTOS setup
xTaskCreate(debugTask1, "debug1", configMINIMAL_STACK_SIZE, NULL, tskIDLE_PRIORITY + 1, NULL);
xTaskCreate(debugTask2, "debug2", configMINIMAL_STACK_SIZE, NULL, tskIDLE_PRIORITY + 1, NULL);
vTaskStartScheduler();
while(1)
{
}
}
/*-----------------------------------------------------------*/
static void debugTask1(void *pvParameters)
{
while(1)
{
GPIOA->BSRR = GPIO_Pin_5;
vTaskDelay( 750 / portTICK_PERIOD_MS ); //any value = millisec
GPIOA->BRR = GPIO_Pin_5;
vTaskDelay( 250 / portTICK_PERIOD_MS ); //any value = millisec
}
}
/*-----------------------------------------------------------*/
static void debugTask2(void *pvParameters)
{
while(1)
{
GPIOA->BSRR = GPIO_Pin_6;
vTaskDelay( 250 / portTICK_PERIOD_MS ); //any value = millisec
GPIOA->BRR = GPIO_Pin_6;
vTaskDelay( 250 / portTICK_PERIOD_MS ); //any value = millisec
}
}
/*-----------------------------------------------------------*/
void my_system_init(void)
{
extern void SystemInit(void);
extern void SystemCoreClockUpdate(void);
uint16_t HSEState = 0;
uint16_t StartUpCounter = 0;
//--------------------rcc
SystemInit();
SystemCoreClockUpdate();
//---CR
//Enable HSE
RCC->CR |= ((uint32_t)RCC_CR_HSEON);
//Wait till HSE is ready and if time out is reached exit
do
{
HSEState = RCC->CR & RCC_CR_HSERDY;
StartUpCounter++;
} while((HSEState == 0) && (StartUpCounter != HSE_STARTUP_TIMEOUT));
//---CFGR
RCC->CFGR |= ((uint32_t)RCC_CFGR_HPRE_DIV1); // HCLK = SYSCLK
RCC->CFGR |= ((uint32_t)RCC_CFGR_PPRE2_DIV1); // PCLK2 = HCLK
RCC->CFGR |= ((uint32_t)RCC_CFGR_PPRE1_DIV2); // PCLK1 = HCLK
//PLL configuration: PLLCLK=HSE*9=72MHz
RCC->CFGR &= (uint32_t)((uint32_t)~(RCC_CFGR_PLLSRC | RCC_CFGR_PLLXTPRE | RCC_CFGR_PLLMULL));
RCC->CFGR |= (uint32_t)(RCC_CFGR_PLLSRC_HSE | RCC_CFGR_PLLMULL9);
//Enable PLL
RCC->CR |= RCC_CR_PLLON;
//wait till PLL is ready
while((RCC->CR & RCC_CR_PLLRDY) == 0)
{
}
//Select PLL as system clock source
RCC->CFGR &= (uint32_t)((uint32_t)~(RCC_CFGR_SW));
RCC->CFGR |= (uint32_t)RCC_CFGR_SW_PLL;
//wait till PLL is used as system clock source
while((RCC->CFGR & (uint32_t)RCC_CFGR_SWS) != (uint32_t)0x08) //0x08 == RCC_CFGR_SWS_PLL
{
}
//--------------------port
GPIO_InitTypeDef GPIO_InitStructure;
//button
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13; //button
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
//led
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
//GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
این فایل freeRTOSConfig.h رو چجوری بنویسم بهتره؟
مشکلش چیهههههه!!!
نمونه فایل freeRTOSConfig.h که استفاده کردم:
/*
* FreeRTOS Kernel V10.2.0
* Copyright (C) 2019 Amazon.com, Inc. or its affiliates. All rights reserved.<div style="text-align: center"></div>
*
* Permission is hereby granted, free of charge, to any person obtaining a copy of
* this software and associated documentation files (the "Software"), to deal in
* the Software without restriction, including without limitation the rights to
* use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
* the Software, and to permit persons to whom the Software is furnished to do so,
* subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in all
* copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
* FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
* COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
* IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
*
* http://www.FreeRTOS.org
* http://aws.amazon.com/freertos
*
* 1 tab == 4 spaces!
*/
#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H
/*-----------------------------------------------------------
* Application specific definitions.
*
* These definitions should be adjusted for your particular hardware and
* application requirements.
*
* THESE PARAMETERS ARE DESCRIBED WITHIN THE 'CONFIGURATION' SECTION OF THE
* FreeRTOS API DOCUMENTATION AVAILABLE ON THE FreeRTOS.org WEB SITE.
*
* See http://www.freertos.org/a00110.html
*----------------------------------------------------------*/
#define configUSE_PREEMPTION 1
#define configUSE_IDLE_HOOK 0
#define configUSE_TICK_HOOK 0
#define configCPU_CLOCK_HZ ( ( unsigned long ) 72000000 )
#define configTICK_RATE_HZ ( ( TickType_t ) 1000 )
#define configMAX_PRIORITIES 9//( ( unsigned portBASE_TYPE ) 40 )//( 5 )
#define configMINIMAL_STACK_SIZE ( ( unsigned short ) 128 )
#define configTOTAL_HEAP_SIZE ( ( size_t ) ( 4 * 1024 ) ) //( ( size_t ) ( 17 * 1024 ) )
#define configMAX_TASK_NAME_LEN ( 16 )
#define configUSE_TRACE_FACILITY 0
#define configUSE_16_BIT_TICKS 0
#define configIDLE_SHOULD_YIELD 1
/* Co-routine definitions. */
#define configUSE_CO_ROUTINES 0
#define configMAX_CO_ROUTINE_PRIORITIES ( 2 )
/* Set the following definitions to 1 to include the API function, or zero
to exclude the API function. */
#define INCLUDE_vTaskPrioritySet 1
#define INCLUDE_uxTaskPriorityGet 1
#define INCLUDE_vTaskDelete 1
#define INCLUDE_vTaskCleanUpResources 0
#define INCLUDE_vTaskSuspend 1
#define INCLUDE_vTaskDelayUntil 1
#define INCLUDE_vTaskDelay 1
/* This is the raw value as per the Cortex-M3 NVIC. Values can be 255
(lowest) to 0 (1?) (highest). */
#define configKERNEL_INTERRUPT_PRIORITY 1//255
/* !!!! configMAX_SYSCALL_INTERRUPT_PRIORITY must not be set to zero !!!!
See http://www.FreeRTOS.org/RTOS-Cortex-M3-M4.html. */
#define configMAX_SYSCALL_INTERRUPT_PRIORITY 4//191 /* equivalent to 0xb0, or priority 11. */
/* This is the value being used as per the ST library which permits 16
priority values, 0 to 15. This must correspond to the
configKERNEL_INTERRUPT_PRIORITY setting. Here 15 corresponds to the lowest
NVIC value of 255. */
#define configLIBRARY_KERNEL_INTERRUPT_PRIORITY 1//15
//---------------------------------------------------------------
//The priorities are as follows:
//#define configMAX_PRIORITIES( ( unsigned portBASE_TYPE ) 40 )
//#define configMAX_CO_ROUTINE_PRIORITIES ( 2 )
/* Software timer definitions. */
#define configUSE_TIMERS 1
#define configTIMER_TASK_PRIORITY ( configMAX_PRIORITIES - 1 )
#define configTIMER_QUEUE_LENGTH 5
#define configTIMER_TASK_STACK_DEPTH ( configMINIMAL_STACK_SIZE * 2 )
/* The interrupt priority used by the kernel itself for the tick interrupt and the pended interrupt. This would normally be the lowest priority. */
//#define configKERNEL_INTERRUPT_PRIORITY 1
/* The maximum interrupt priority from which FreeRTOS API calls can be made.
Interrupts that use a priority above this will not be effected by anything the kernel is doing. */
//#define configMAX_SYSCALL_INTERRUPT_PRIORITY 4
#endif /* FREERTOS_CONFIG_H */
دوستان کارم گیر راه اندازی freertos هستش اگر کسی میتونه کمکی کنه مشکلی با هزینش ندارم فقط کارم زودتر راه بیفته سه هفته شدههههههه






دیدگاه