

پاسخ : پاسخ : راه اندازی موتور براشلس (BLDC)
اینطور نیست.
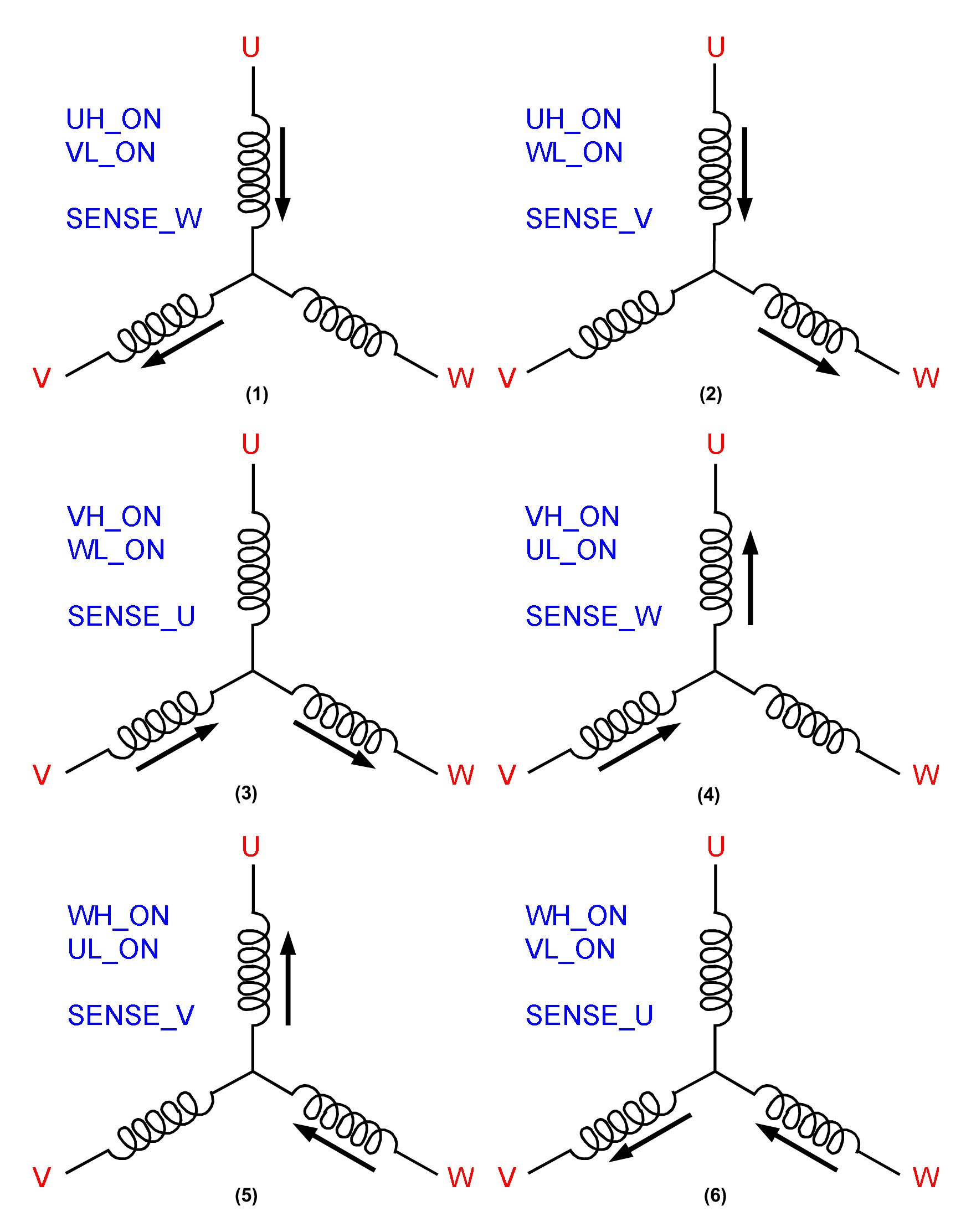
در هر لحظه دو فاز به موتور وصله.
نوشته اصلی توسط gtnfs
در هر لحظه دو فاز به موتور وصله.
 و منم میومدم به جمع راه اندازان براشلس.
و منم میومدم به جمع راه اندازان براشلس. 










دیدگاه